11
11Гибридные робомодуляторы для быстрой переналадки конвейеров под микрофабрики через цифровую тропу IIoT представляют собой современное сочетание механических адаптеров, сенсорных узлов и программно-аппаратных мостов, позволяющих оперативно переналаживать конвейерные линии под новые задачи без значимых простоя. В условиях микрофабрик, где требования к чистоте, точности и повторяемости высоки, такие решения становятся критически важными для снижения времени цикла производства, повышения гибкости и уменьшения затрат на переналадку. Гибридность здесь означает синтез трех уровней технологий: механических элементов переналадки, интеллектуальных модулей управления и цифрового взаимодействия через IIoT-тропу, обеспечивающую мониторинг, удаленную настройку и предиктивную аналитику.
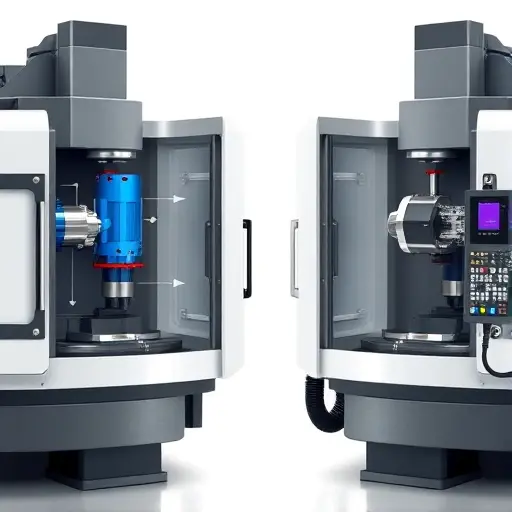
Гибридный робомодулятор — это модуль, который объединяет в единой платформе механическую переналадку конвейерной ленты, приводной механизм с регулируемой скоростью и torque, а также электронную систему управления с возможностью автономной работы и внешнего управления по цифровой тропе IIoT. Основные слои архитектуры включают механический уровень, уровень электрик-механических приводов, уровень контроля и сигнализации, а также цифровой уровень, отвечающий за связь, аналитику и управление конфигурациями.
Механический уровень предусматривает адаптеры ленты, сменные секции конвейера, быстроразъемные узлы фиксации и модульные декураторы для размещения датчиков. Электрический уровень обеспечивает привод, датчики положения, скорости, усилия и обратную связь по состоянию узлов. Контрольный уровень объединяет программируемые логические контроллеры (PLC), промышленные компьютеры и встроенные микроконтроллеры для локального управления скоростью, позиционированием и безопасностью. Цифровой уровень IIoT-тропы организует сбор данных, мониторинг состояния, удаленную переналадку и взаимодействие с системой цифрового двойника фабрики.
Ключевые компоненты включают:
IIoT-тропа — это инфраструктура сбора, передачи и обработки данных между устройствами на конвейере и облачными или локальными системами управления предприятием. В рамках гибридных робомодуляторов цифровая тропа обеспечивает:
Быстрая переналадка представляет собой способность переключать конфигурации конвейера под разные задачи с минимальным временем простоя. В контексте микрофабрик это особенно важно, поскольку малые партии и частые переключения требуют высокой гибкости и точности.
Основные принципы включают:
Для эффективной переналадки применяются следующие методы:
Безопасность и надежность являются критическими аспектами при роботизированной переналадке конвейеров на микро- и нано-производстве. В рамках гибридных робомодуляторов следует обеспечить:
Надежность достигается через:
Интеграция гибридных робомодуляторов с микрофабрикой строится вокруг существующей инфраструктуры цифрового двойника и тропы IIoT. Цифровой двойник модели конвейера и процесса переналадки обновляется в реальном времени на основе входящих данных от сенсоров и событий управления. Тропы IIoT обеспечивают безопасный обмен информацией между локальными устройствами, MES-системой, ERP и облачными сервисами аналитики.
Этапы интеграции включают:
Типовые сценарии включают:
Внедрение гибридных робомодуляторов приносит ряд преимуществ для микрофабрик:
Экономическая эффективность определяется снижением простоев, уменьшением затрат на настройку линии, уменьшением брака и улучшением общего срока службы оборудования. Расчеты ROI зависят от частоты переналадок, объема выпуска и стоимости простоя. В типичном случае ROI достигается в течение 6–18 месяцев в зависимости от масштаба внедрения и уровня автоматизации.
| Параметр | Традиционная архитектура | Гибридная робомодуляторная архитектура |
|---|---|---|
| Время переналадки | Часто длительные простои и ручные операции | Значительно сокращено за счет модульности и цифровой поддержки |
| Гибкость | Ограниченная адаптация под новые профили | Высокая: быстрые смены конфигураций и профилей |
| Безопасность | Минимальная интеграция по безопасному управлению | Расширенная безопасность через диагностику, мониторинг и безопасные обновления |
| Стоимость владения | Высокие затраты на простои и обслуживание | Снижены за счет уменьшения простоев и оптимизации эксплуатации |
| Интеграция с IIoT | Ограниченная или локальная | Глубокая интеграция: сбор данных, аналитика, цифровой двойник |
Для успешного внедрения гибридных робомодуляторов следует пройти несколько ключевых этапов:
Риски внедрения включают:
Будущее развитие гибридных робомодуляторов предполагает более тесную интеграцию с искусственным интеллектом, усиление автономности переналадки, расширение возможностей предиктивной аналитики и более тесную координацию между физическими конфигурациями и цифровыми моделями. В горизонте 3–5 лет ожидается внедрение самонастраивающихся модулей, более глубокая интеграция с умными контрактами и промышленными сетями 5G/6G для мгновенной реакции на изменения спроса и условий производственной среды.
В реальных проектах компании применяют гибридные робомодуляторы для переналадки конвейеров в микро-электронике, биомедицинских устройствах и микроэлектронике. Примеры включают:
При реализации гибридных робомодуляторов следует учитывать следующие технические требования:
Гибридные робомодуляторы для быстрой переналадки конвейеров под микрофабрики через цифровую тропу IIoT представляют собой инновационное решение, позволяющее сочетать точность механических переналадок, интеллектуальные возможности управления и мощную цифровую инфраструктуру. Такой подход обеспечивает значительно более быструю переналадку, повышенную гибкость производственных линий, улучшенную безопасность и эффективное использование ресурсов. В условиях растущего спроса на микро- и нано-производство, внедрение гибридных робомодуляторов становится стратегическим элементом конкурентоспособности предприятий: они сокращают время вывода новых продуктов на рынок, снижают опасность ошибок и позволяют оперативно адаптироваться к изменяющимся условиям. В долгосрочной перспективе эта технология будет развиваться через интеграцию с искусственным интеллектом, расширением возможностей предиктивной аналитики и более глубокой связью между физической и цифровой фабриками, создавая устойчивые экосистемы гибкого и автономного производства.
Гибридные робомодуляторы объединяют квази-стационарные и подвижные узлы управления машинами: они способны быстро перенастраивать параметры конвейера (скорость, шаг, напряжение резки и т. п.) без полной остановки линии, используя преднастроенные сценарии и цифровые тропы IIoT. В отличие от обычных систем переналадки, они поддерживают модульную замену узлов и автоматическую настройку по профилям продукции, минимизируя время переналадки от минут до секунд и снижая риск ошибок, связанных с ручной настройкой.
Цифровая тропа IIoT моделирует поток информации и команд между датчиками, контроллерами и роботами. Она обеспечивает мгновенное распространение изменённых параметров, резервирование конфигураций под конкретную линейку изделий и автономную адаптацию робомодуляторов на каждом этапе конвейера. В результате перенос настроек происходит автоматически, а оператор получает прозрачные рекомендации по выбору траектории, минимизируя простои и повышая повторяемость качества продукции.
Ключевые критерии: совместимость с существующими стандартами IIoT и OPC UA, модульность архитектуры, быстродействие переналадки (скорость обновления параметров), устойчивость к помехам в производственной среде, безопасность данных и доступность резервирования конфигураций. Также важно учитывать требования по энергопотреблению, размеру узлов и возможности удалённой диагностики через цифровые тропы IIoT для быстрого устранения неисправностей.
Этапы включают: аудит текущих процессов и конфигураций линий; выбор модульной архитектуры с готовыми профилями переналадки; интеграцию с цифровой тропой IIoT и настройку сценарием переналадки; пилотный запуск на одной линии; масштабирование на остальные конвейеры с постепенным переносом данных и обучения персонала. Важна также разработка плана обеспечения кибербезопасности и мониторинга производительности, чтобы снижение времени простоя сопровождалось контролируемой стабильностью качества.
Да, с использованием гибридных робомодуляторов и цифровой тропы IIoT можно минимизировать или почти исключить простои. Критичные параметры: точность синхронизации движений на этапе переналадки, скорость загрузки новой конфигурации, согласование с подтоварной управляющей логикой, устойчивость к вариациям нагрузки и качество связи между узлами. Важны also предсохранённые сценарии переналадки, которые позволяют мгновенно применить нужные параметры без ручной настройки оператором.